LA CHIRURGIE ROBOTIQUE (ou ROBOT ASSISTEE)
Technique incoutournable aujourd'hui, nous sommes devenus des chirurgiens robotiques.
HISTORIQUE
Le développement technologique a toujours fait partie de l’activité humaine. Rapidement, en médecine, nos « pères » ont développé de nouvelles techniques pour mieux opérer leurs patients. En 1901, Georges Kelling utilise, pour la première fois le terme de cœlioscopie pour examiner la cavité abdominale après l'avoir gonflée d'air. Après la première cholécystectomie cœlioscopique faite à Lyon en 1987, la chirurgie mini-invasive se développe rapidement : 1ère néphrectomie et 1ère prostatectomie radicale en 1991, 1ère prostatectomie par Pr Abbou en 2001. En 2003, Mani Menon à Chicago, réalise la première prostatectomie robot assistée. Depuis cette date, Le nombre de prostatectomiesrobot-assistées a considérablement augmenté et représente la majorité des prostatectomies réalisées aux Etats Unis et 30% de celles réalisées en France.
La chirurgie mini-invasive a permis de
- diminuer les douleurs en post-opératoire,
- diminuer le risque infectieux ;
- diminuer le risque de complications « pariétales » (abcès de paroi, éventration),
- diminuer le risque d’adhérences péritonéales,
- diminuer les pertes sanguines
- diminuer la durée d’hospitalisation,
- diminuer la durée d’arrêt de travail
- améliorer le résultat esthétique.


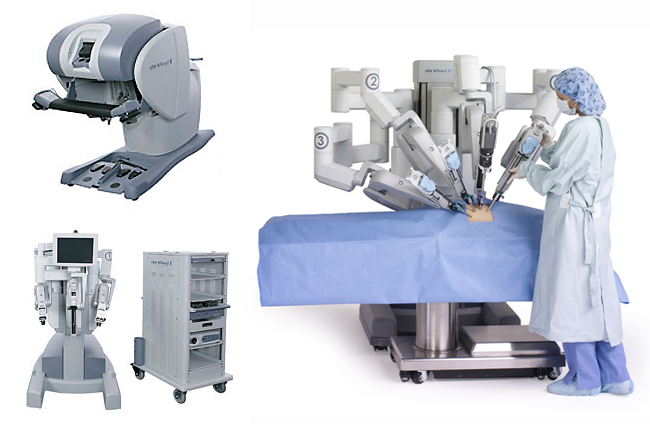
LE SYSTEME da VINCI
Le principe de la chirurgie robotique est de remplacer le chirurgien au niveau du champ opératoire par un système robotisé commandé par le chirurgien via une console. Le système se compose de trois parties.
- La console opérateur : Le chirurgien est assis à quelques mètres du patient. Grâce à un système de joystick et de pédales, le chirurgien se déplace à l’intérieur du patient en commandant la caméra et les différents instruments. Il bénéficie d’une image tridimensionnelle en haute définition, son tremblement physiologique n’est pas transmis aux instruments. Les joysticks permettent six degré de liberté(au moins autant que la main), le geste chirurgical est d’une très grande précision. Ce système permet d’avoir accès à des structures situées dans des zones peu accessibles lors d’un abord conventionnel (coelioscopique ou par incision abdominale), avec une précision microscopique.
- Le chariot patient : Il est composé de 2 ou 3 bras porte instruments(crochets à dissection mono polaire, pince bipolaire, pince d'exposition,ciseau, porte aiguille, etc.)et d’un bras porte caméra. Par un système de connectique évolué, les instruments reproduisent intégralement les gestes réalisés par le chirurgien au niveau des joysticks. L’articulation de ces instruments est possible sur 540°, offrant ainsi un avantage certain par rapport aux instruments non-robotiques de la cœlioscopieconventionnelle.
- La colonne vidéo et connectique : Elle utilise les dernièrestechnologies en matière de vidéo haute définition. Elle comporte un écran moniteur à son étage supérieur, et sur les étages inférieurs le nécessaire à la cœlioscopie et la centrale informatique du système robotique.

La chrirugie robotique est utilisée par différentes spécialités : ORL, chirurgie digestive, urologie, gynécologie, cardio-thoracique …
LA CHIRURGIE ROBOTIQUE EN UROLOGIE
L’utilisation du robot Da Vinci, lors d’une prostatectomie radicale, permet selon certaines études de diminuer les marges chirurgicales, de diminuer le risque d’incontinence et de permettre une meilleure récupération de la fonction érectile.
Le robot da Vinci peut aussi être très utile dans la chirurgie du rein. En effet de par sa précision et sa maniabilité, il peut permettre l’exérèse d’une tumeur rénale en conservant le rein (chirurgie partielle du rein) tout en limitant la taille de la cicatrice et donc les douleurs post-opératoires.
L’utilisation du robot da Vinci est la technique de référence pour ce type d’intervention aux Etats- Unis.
LES COÛTS
Le seul inconvénient représenté par cette technologie est son coût d’achat et de maintenance annuelle. Le coût d’une procédure (instruments) varie de 1200 à 1500 euros.
Ces surcoûts majeurs ne sont pas pour le moment pris en compte par l’Assurance Maladie. On peut imaginer que sa priorité actuelle porte sur la réduction du déficit etqu’elle n’est pas susceptible, à court terme, de changer d’attitude.
Aussi, et pour ne pas se priver de cette avancée majeure, la clinique absorbe une partie des surcoûts (amortissement et maintenance) et demande au chirurgien une participation sous forme de redevance pour l’utilisation d’un matériel spécifique.